2-2. 차근차근 터틀을 움직이기
【궁금해요! 함께 알아봐요!】
1. 엔트리에서 터틀은 어떻게 움직일까요?
2. 터틀이 친구를 만나려면 어떤 블록이 필요할까요?
엔트리 프로그램과 하드웨어인 터틀이 연결되면 새로운 블록들을 활용할 수 있다. 이 단원에서는 하드웨어에 생성된 새로운 블록들을 어떻게 사용할 수 있는지 알아보고, 간단한 블록 명령을 통해 터틀을 움직여 보도록 한다.
1터틀 움직이기
활동1
터틀 움직이기
활동
1
터틀 움직이기
[활동안내]
1.엔트리에서 터틀을 움직이는 방법을 알고, 방향키를 눌렀을 때 각각 정해진 방향으로 터틀을 움직이도록 표현한다. 2.말판에 터틀을 놓고, 방향키를 눌러 목적지까지 움직인다.
1.엔트리에서 터틀을 움직이는 방법을 알고, 방향키를 눌렀을 때 각각 정해진 방향으로 터틀을 움직이도록 표현한다. 2.말판에 터틀을 놓고, 방향키를 눌러 목적지까지 움직인다.

[준비물]
엔트리 프로그램, PC, 동글, 터틀 로봇, 말판(학습지)
엔트리 프로그램, PC, 동글, 터틀 로봇, 말판(학습지)
[활동팁]
1.방향 인지가 어려운 학생의 경우 키보드 및 맵보드에 방향을 표시해 주고, 같은 단어를 찾아 로봇을 움직일 수 있도록 지도한다. 2.90도라는 각도의 개념이 어려운 경우 왼쪽과 오른쪽이라는 단어를 중심으로 지도한다.
1.방향 인지가 어려운 학생의 경우 키보드 및 맵보드에 방향을 표시해 주고, 같은 단어를 찾아 로봇을 움직일 수 있도록 지도한다. 2.90도라는 각도의 개념이 어려운 경우 왼쪽과 오른쪽이라는 단어를 중심으로 지도한다.
우리가 다양한 오브젝트를 명령으로 움직였던 것처럼, 터틀로봇도 명령을 통해 움직인다. 하지만, 이전에 사용했던 것과 다르게 ‘하드웨어’라는 새로운 블록들을 함께 사용한다. 하드웨어 블록을 가지고 로봇을 움직여 볼까?
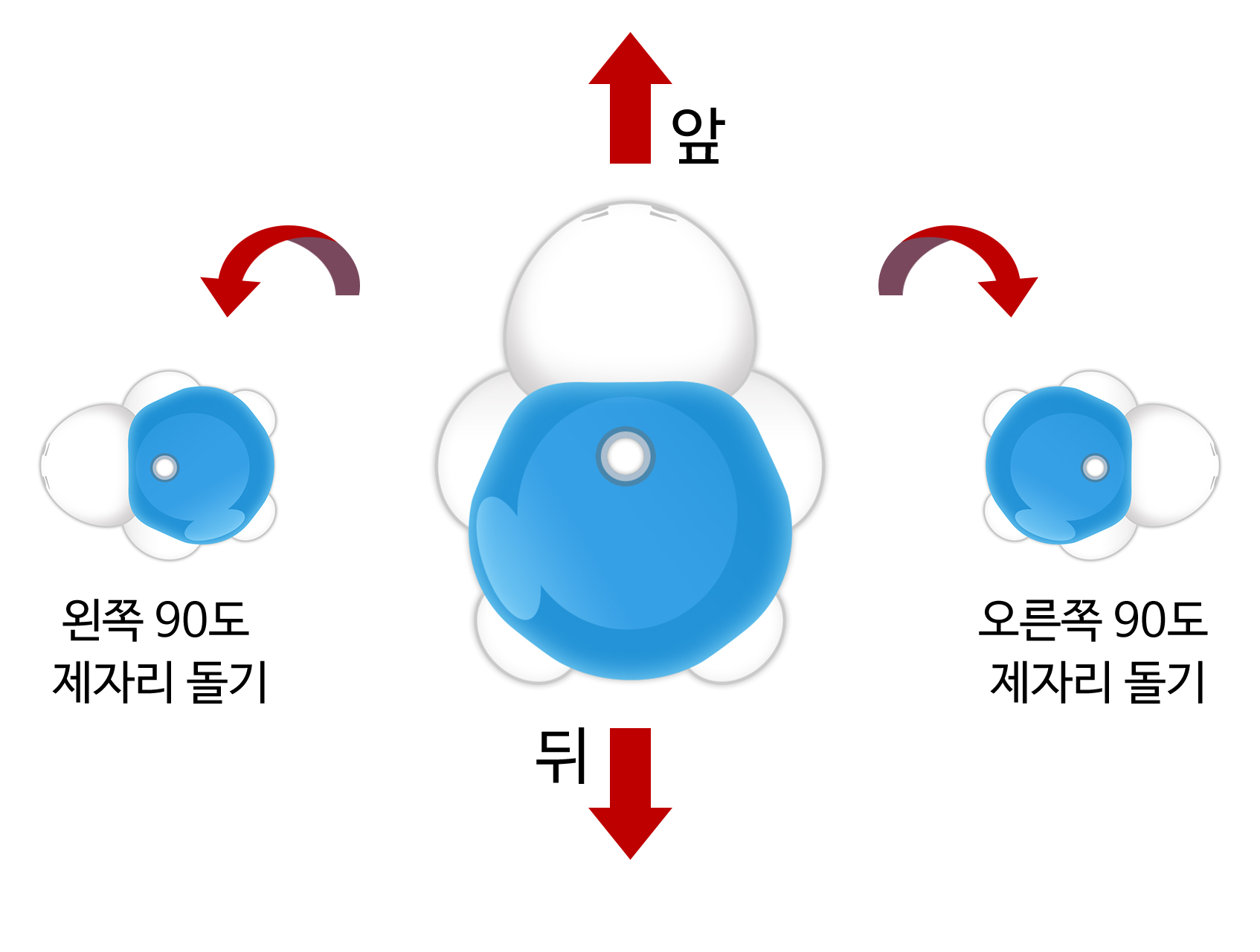
블록을 사용하기 전에 터틀의 움직임 방향을 알아보자. 앞, 뒤, 왼쪽과 오른쪽으로 제자리 돌기의 방향을 구별해 보자.
활동순서
1.터틀을 앞으로, 뒤로 이동시켜 보자.
2.터틀의 방향을 바꾸어 보자.
3.토끼 친구를 만나기 위해 이동해 보자.
2.터틀의 방향을 바꾸어 보자.
3.토끼 친구를 만나기 위해 이동해 보자.
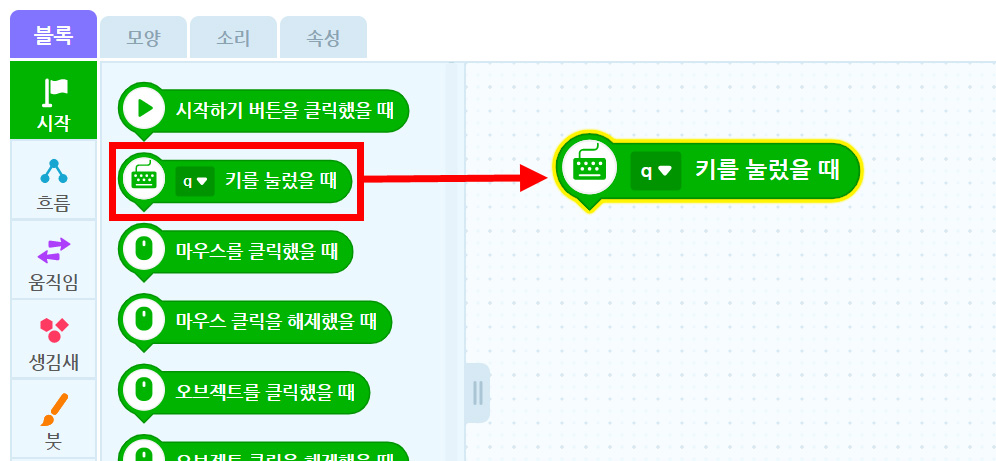
‘시작’ 꾸러미에서 ‘q키를 눌렀을 때’를 블록조립소로 가져온다.
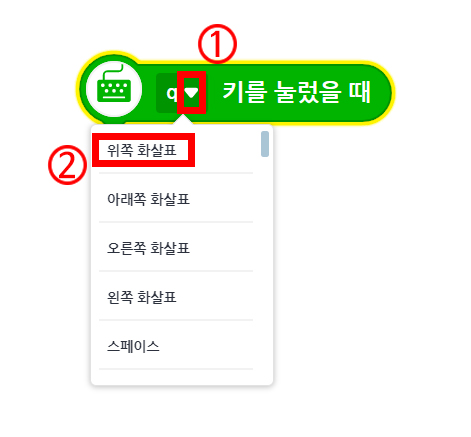
‘-키를 눌렀을 때’ 블록의 키를 바꾸어 보자.
1. 블록 안의 ▼옵션단추를 눌러 준다.
2. ‘위쪽 화살표’를 선택해 준다.

1. ‘하드웨어’ 꾸러미를 선택한다.
2. ‘앞으로 6cm 이동하기’ 블록을 가져와 연결한다.
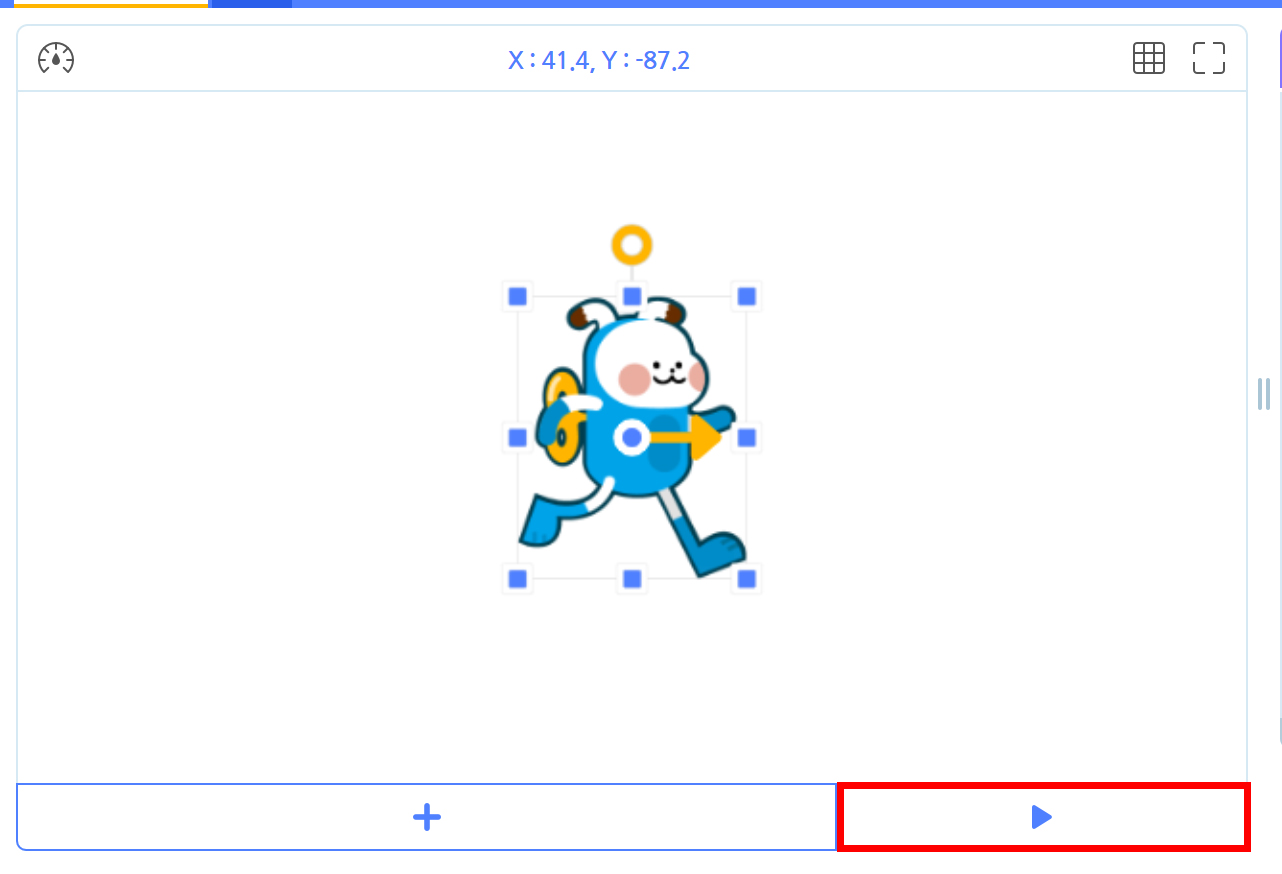
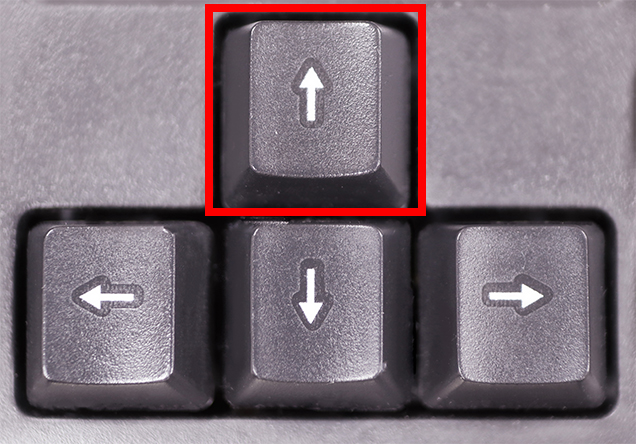
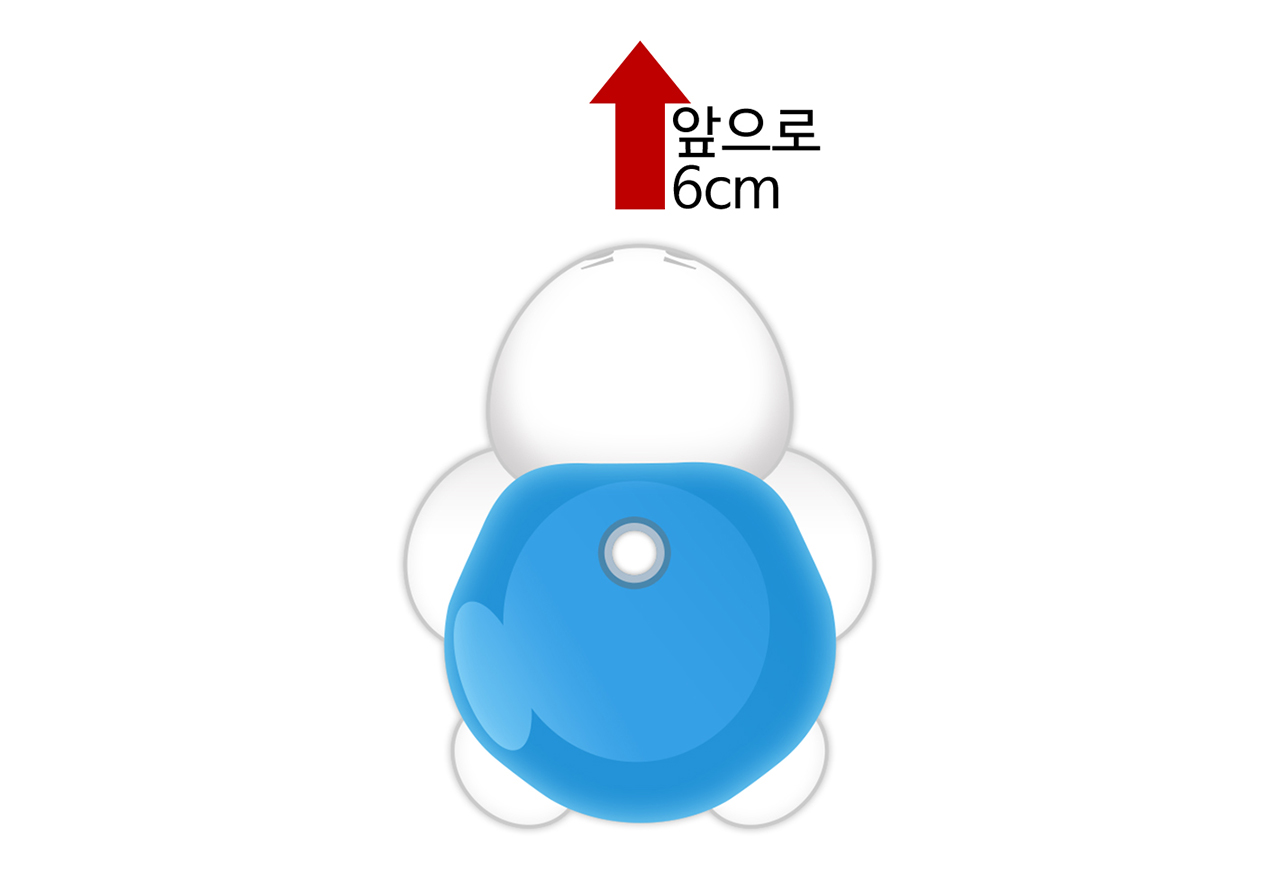
실행화면에서 ▶시작하기 버튼을 누른 뒤, 키보드 방향키의 위쪽 화살표를 누른다.
터틀 로봇이 앞으로 6cm 이동한다.

같은 방법으로 ‘-키를 눌렀을 때’ 블록을 한 번 더 가져와 ‘아래쪽 화살표’로 킷값을 바꿔 준다.

‘아래쪽 화살표’를 눌렀을 때는 뒤로 갈 수 있도록 ‘뒤로 6cm 이동하기’ 블록을 가져와 연결한다.
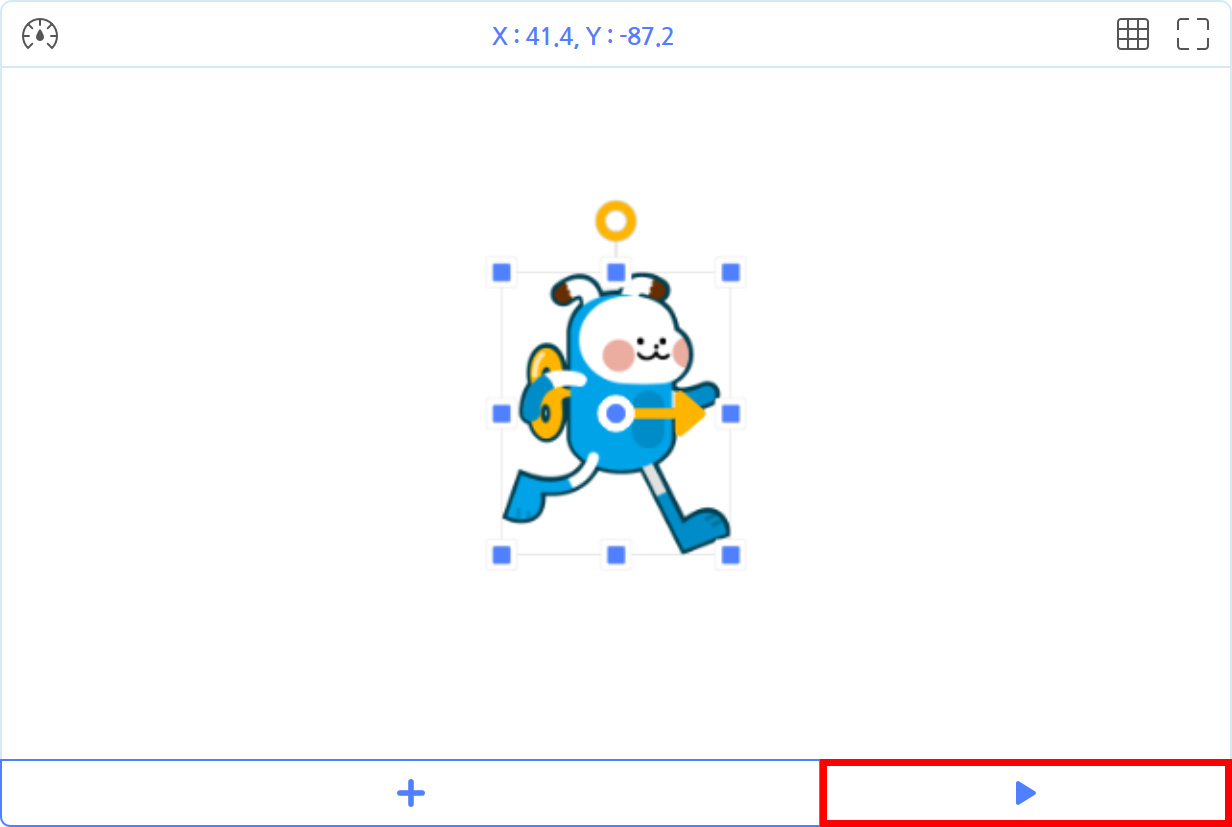
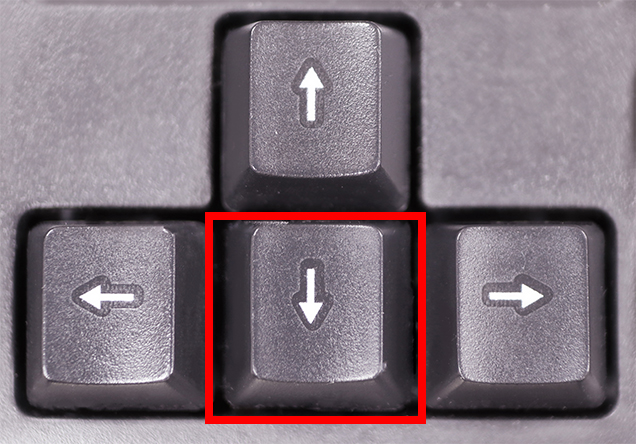
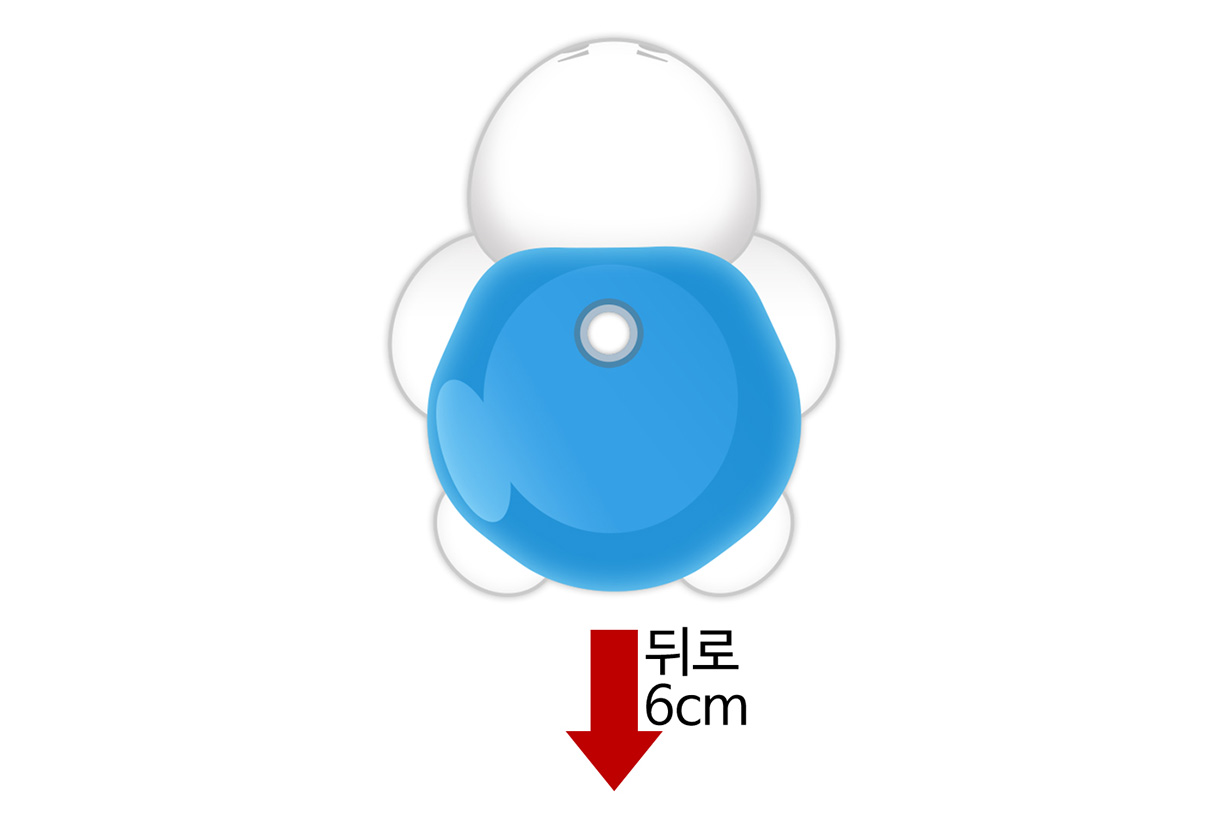
실행화면에서 ▶시작하기 버튼을 누른 뒤, 키보드 방향키의 아래쪽 화살표를 누른다.
터틀 로봇이 뒤로 6cm 이동한다.

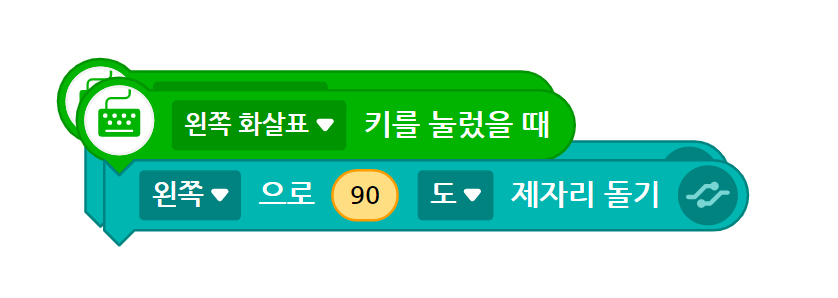
‘시작’꾸러미에서 ‘q키를 눌렀을 때’를 가져와서 ‘왼쪽 화살표’로 바꾸어 준다.

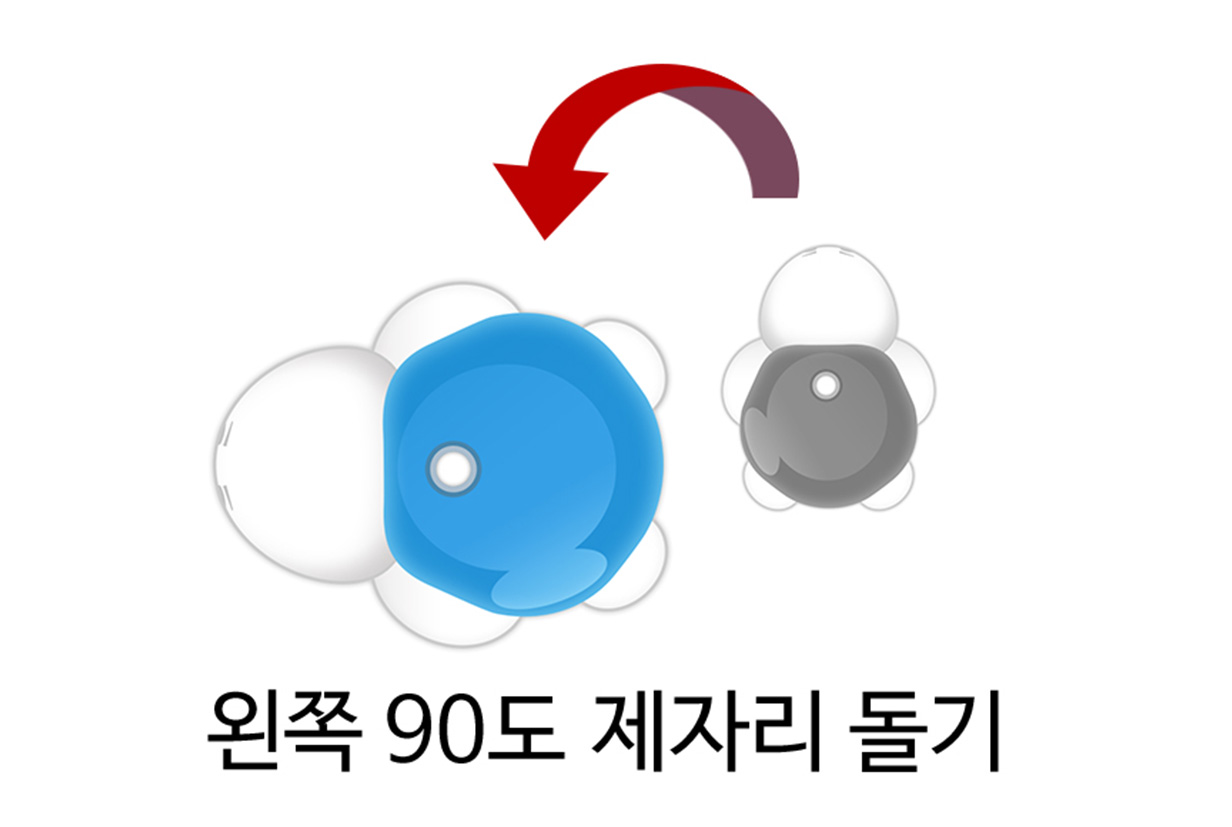
‘하드웨어’꾸러미에서 ‘왼쪽으로 90도 제자리 돌기’를 가져와서 연결해 준다.
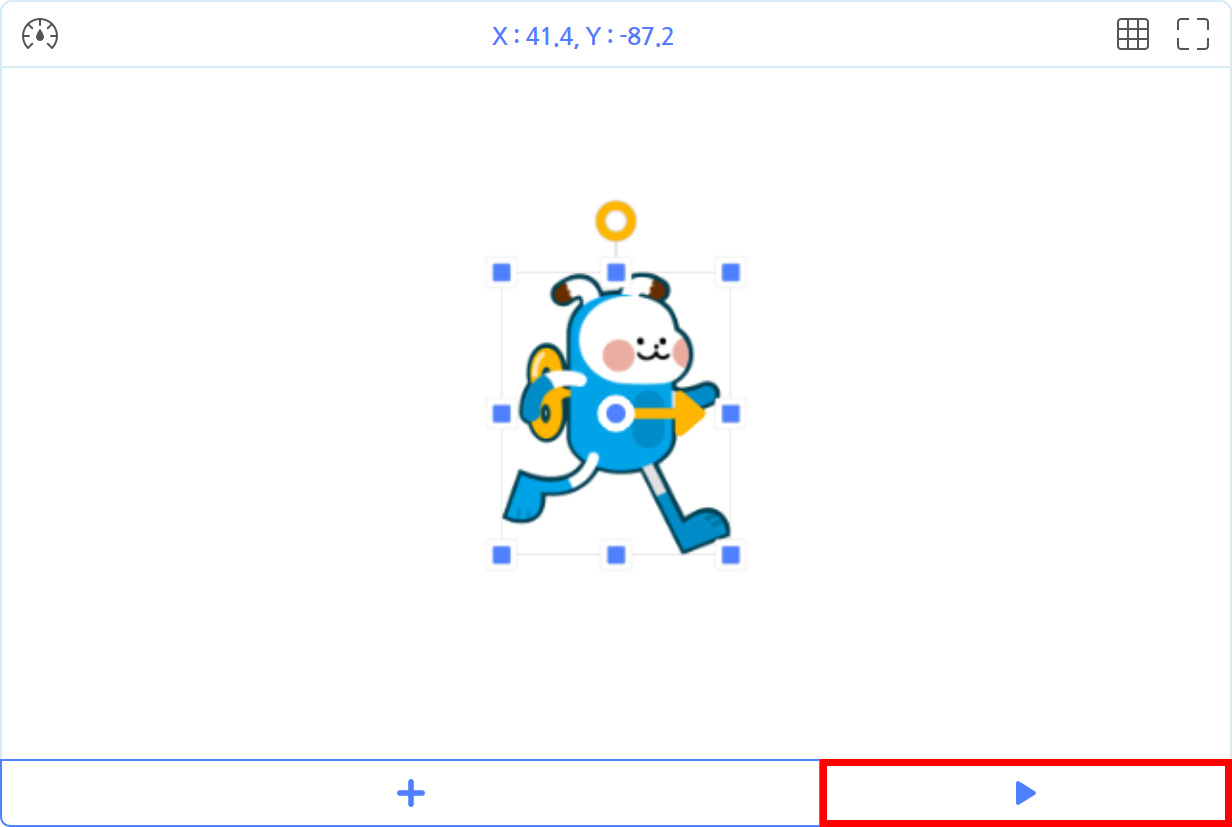
실행화면에서 ▶시작하기 버튼을 누른 뒤, 키보드 방향키의 왼쪽 화살표를 누른다.
터틀 로봇이 왼쪽으로 90도 방향을 회전한다.
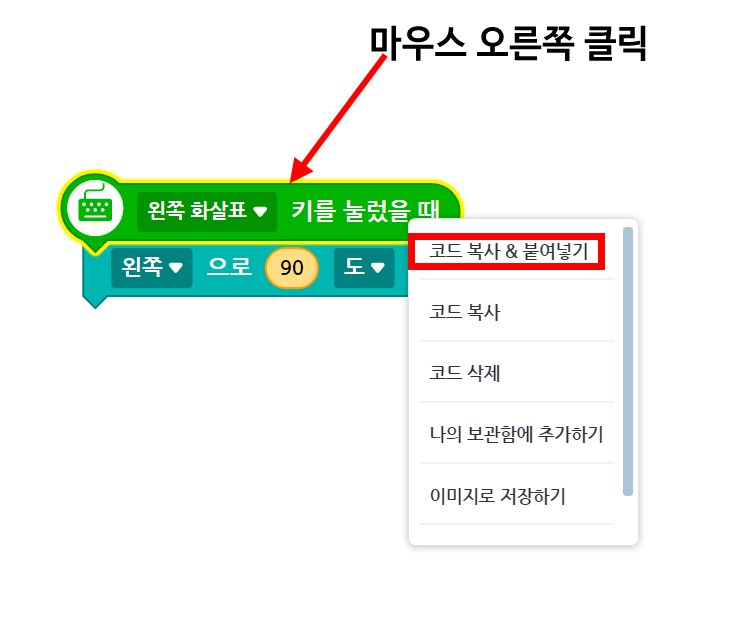
오른쪽 방향키의 값을 만들어 주기 위해 블록을 복사 해 보자.
‘왼쪽 화살표 키를 눌렀을 때’ 블록 위에 마우스 오른쪽을 클릭하여 옵션 창이 떴을 때, ‘코드 복사&붙여넣기’를 선택한다.
같은 블록이 복사되어 나타난다. 겹쳐있는 블록을 마우스로 잡아 위치를 배치해 준다.
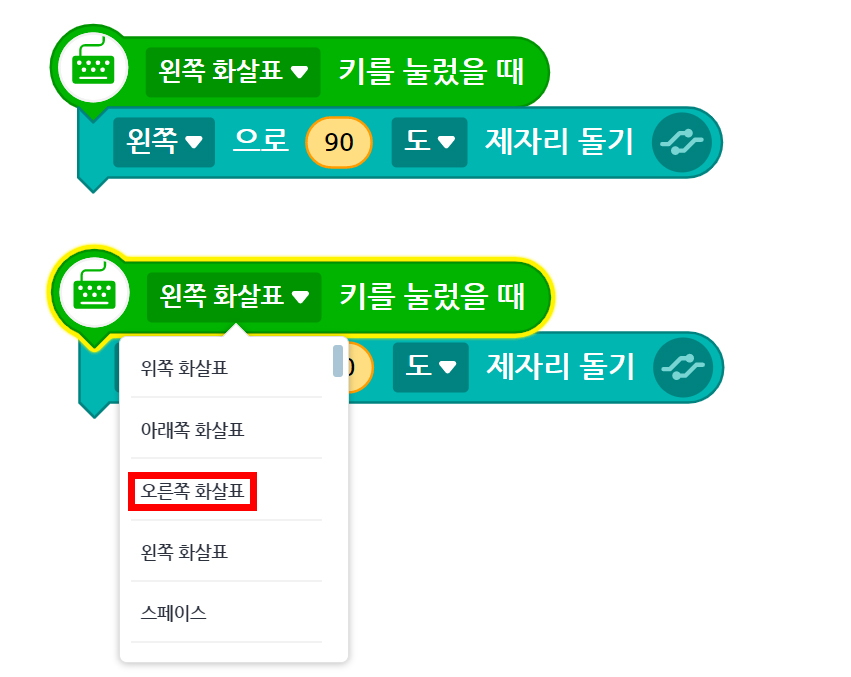
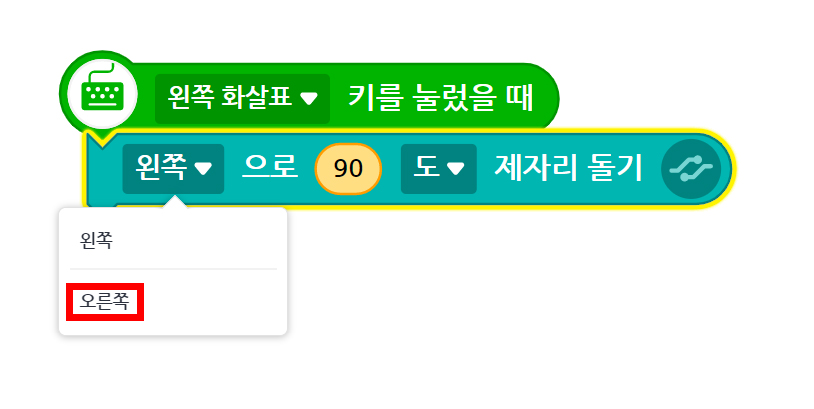
왼쪽을 오른쪽으로 모두 바꾸어 준다.
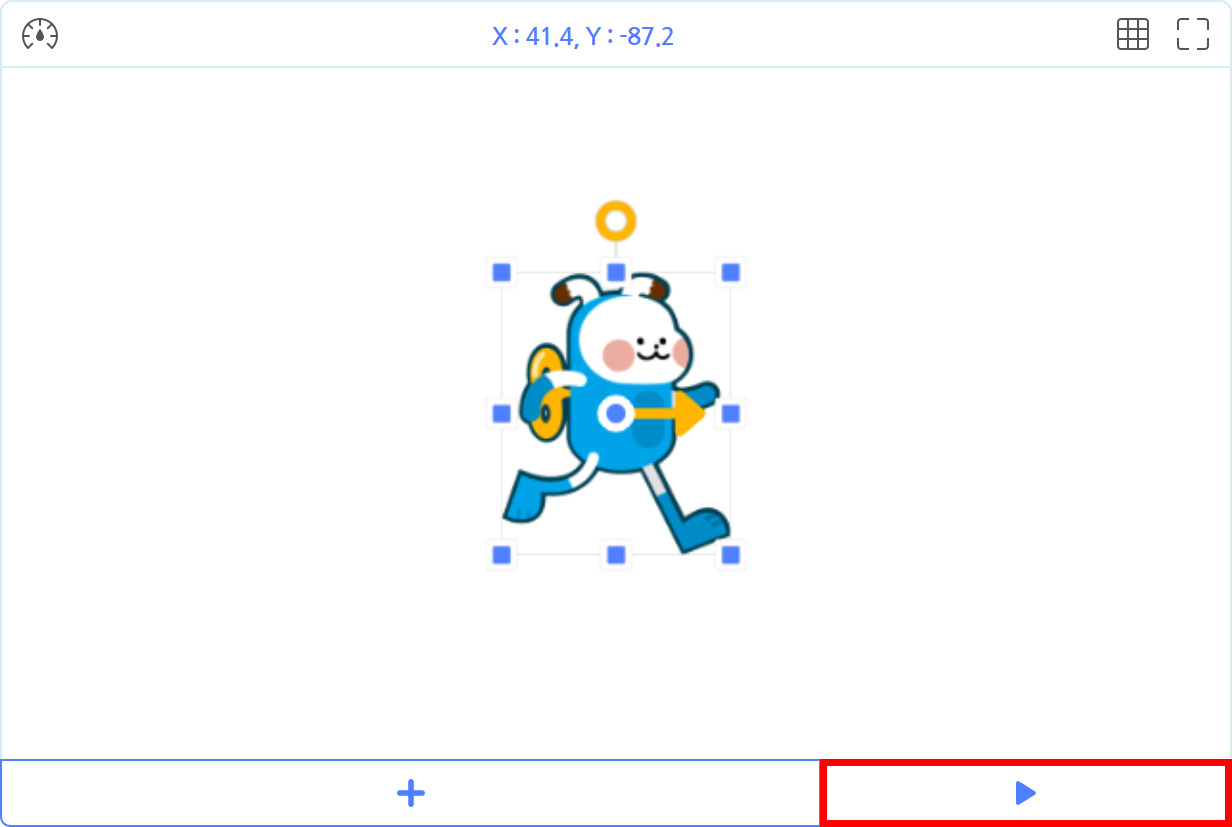

실행화면에서 ▶시작하기 버튼을 누른 뒤, 키보드 방향키의 오른쪽 화살표를 누른다.
터틀 로봇이 오른쪽으로 90도 방향을 회전한다.
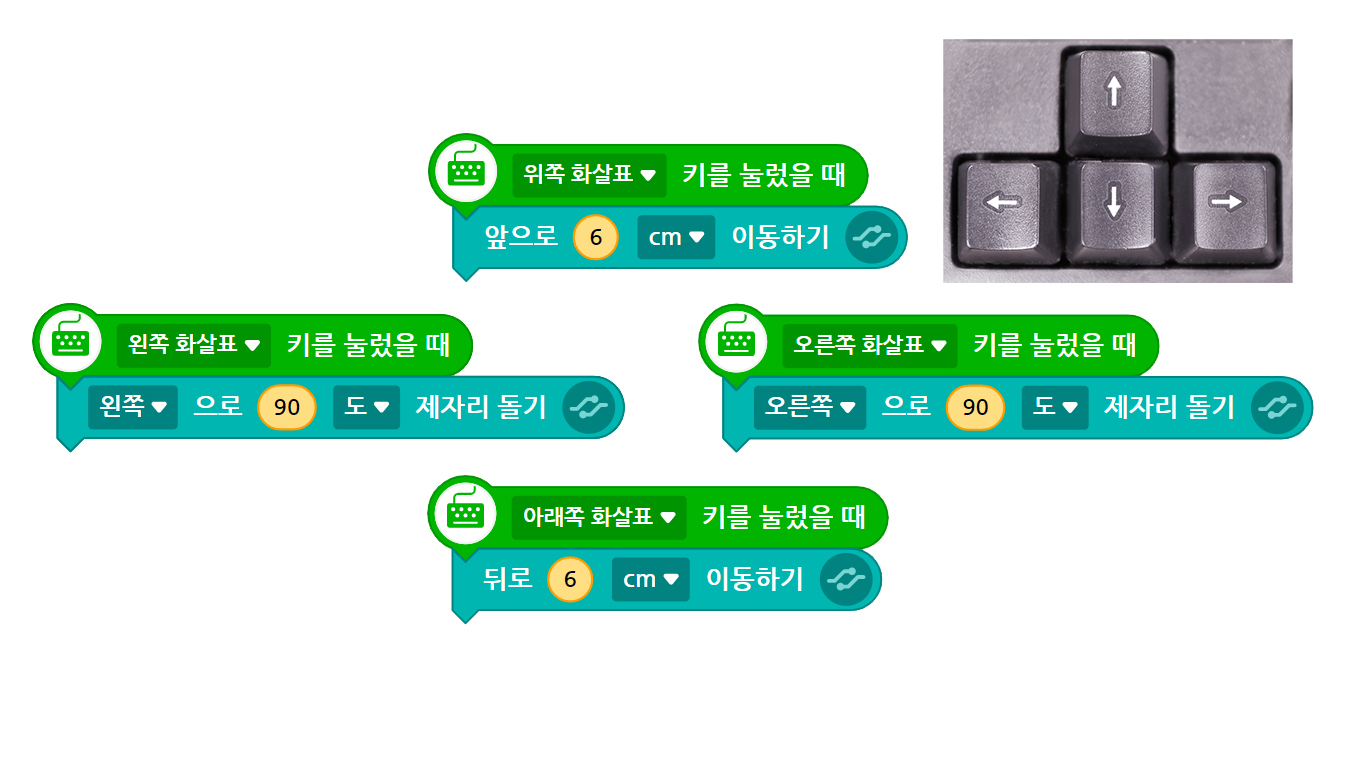
4개의 방향키를 이용하여 로봇에게 움직임 명령을 내릴 수 있는 코드가 완성되었다.
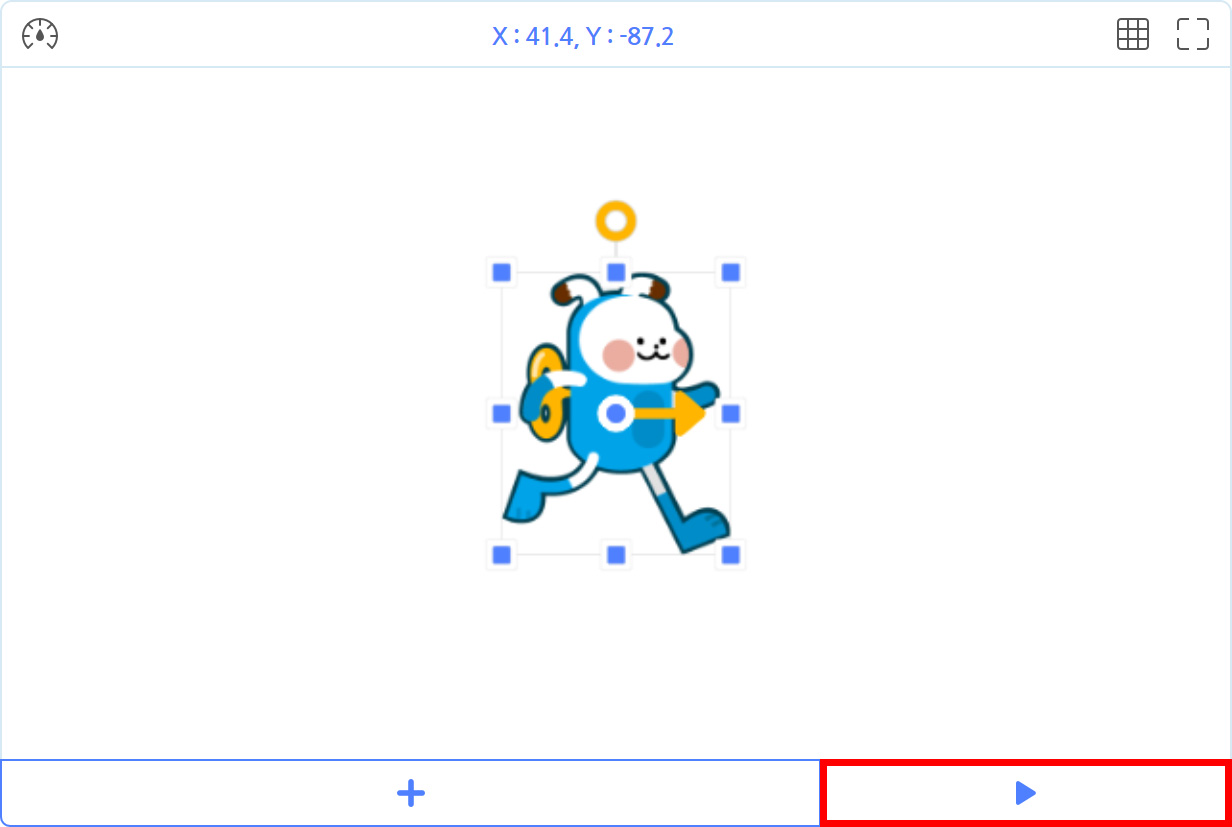

실행화면의 시작하기를 누른 뒤, 각 키보드의 방향키를 눌러보자.
방향키를 눌렀을 때, 터틀 로봇의 움직임을 관찰해 보자.
TIP
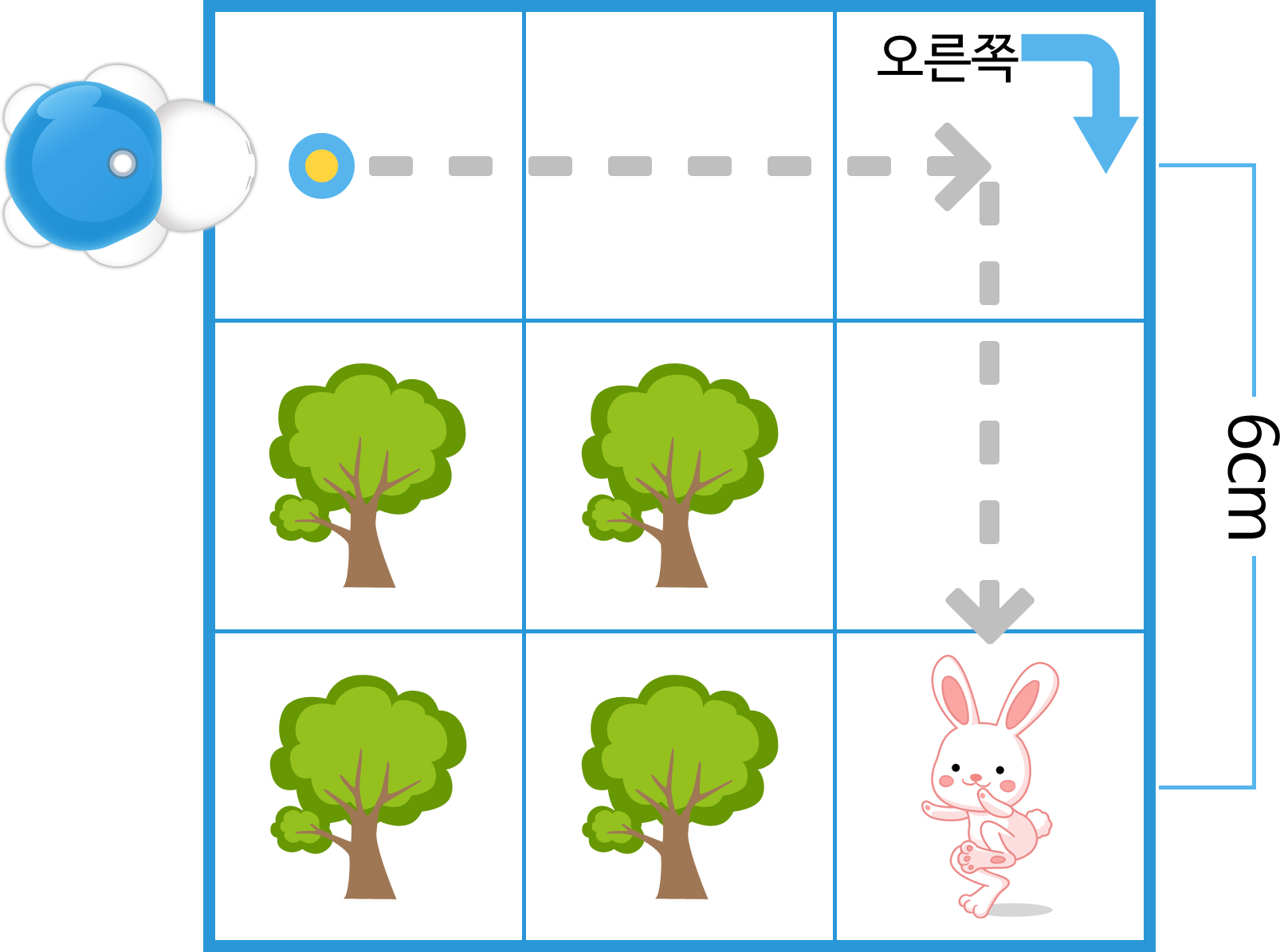
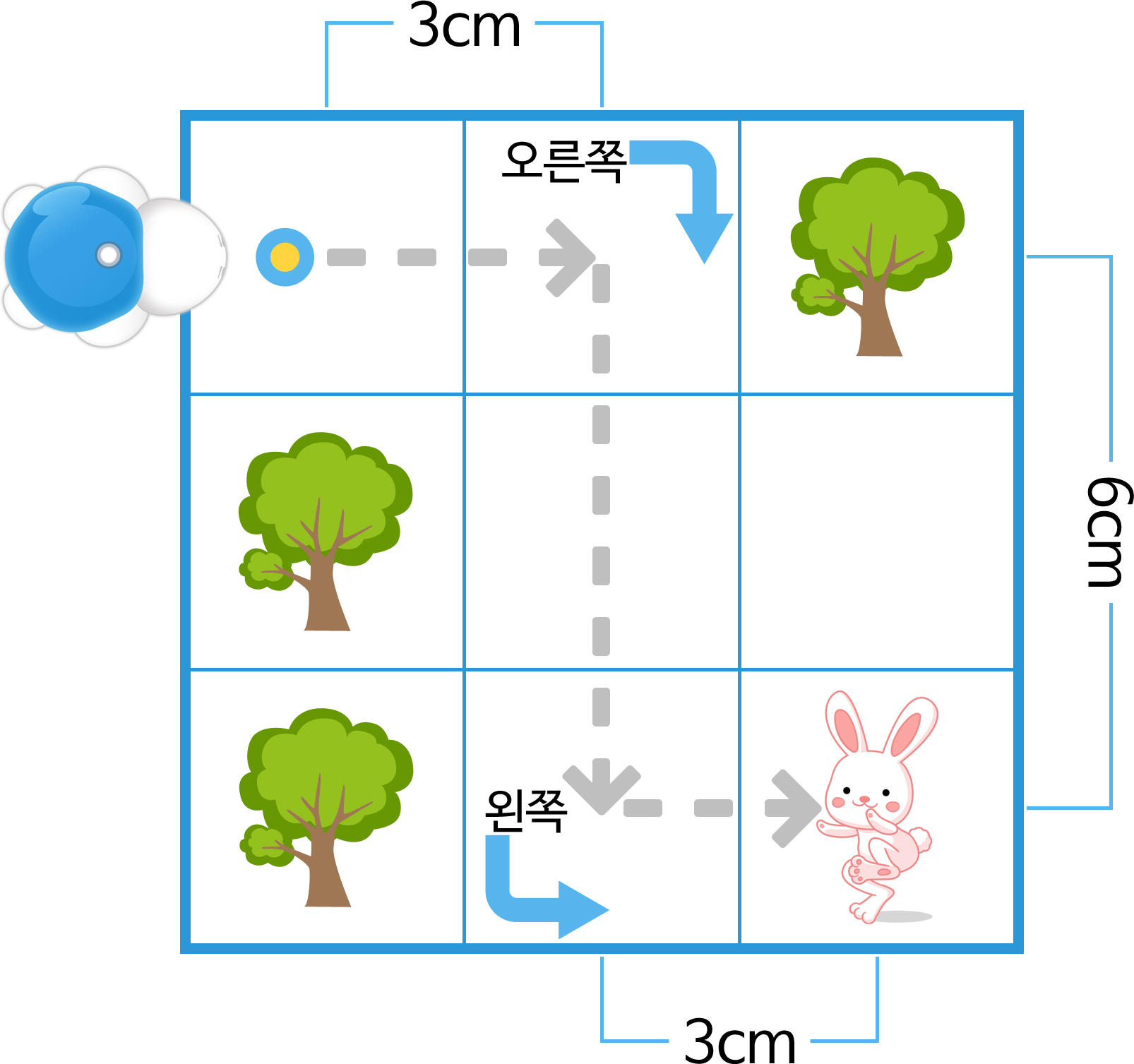
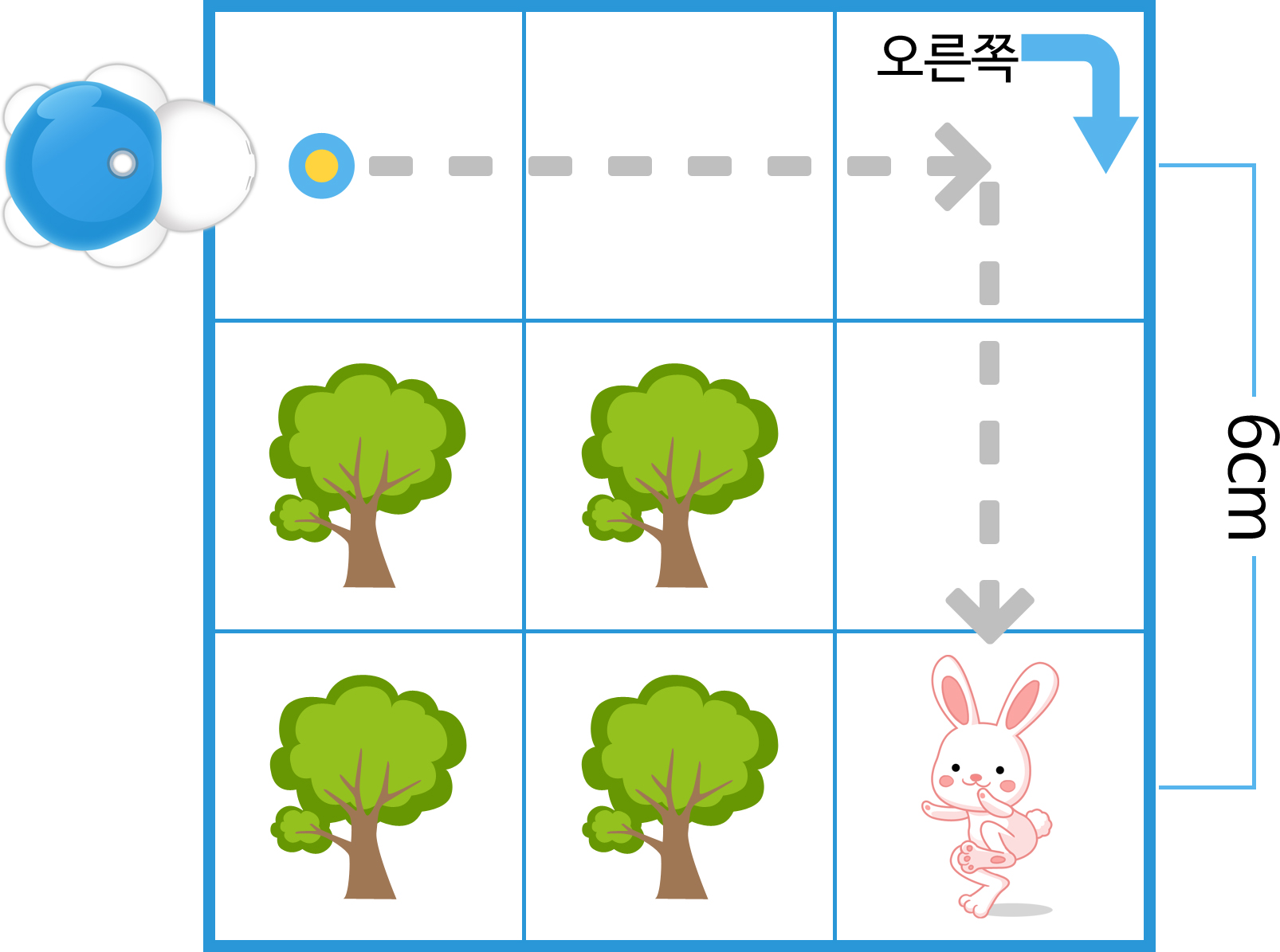
방향키 명령어를 이용하여, 말판에서 터틀 로봇이 토끼 친구에게 갈 수 있도록 움직여 보자.
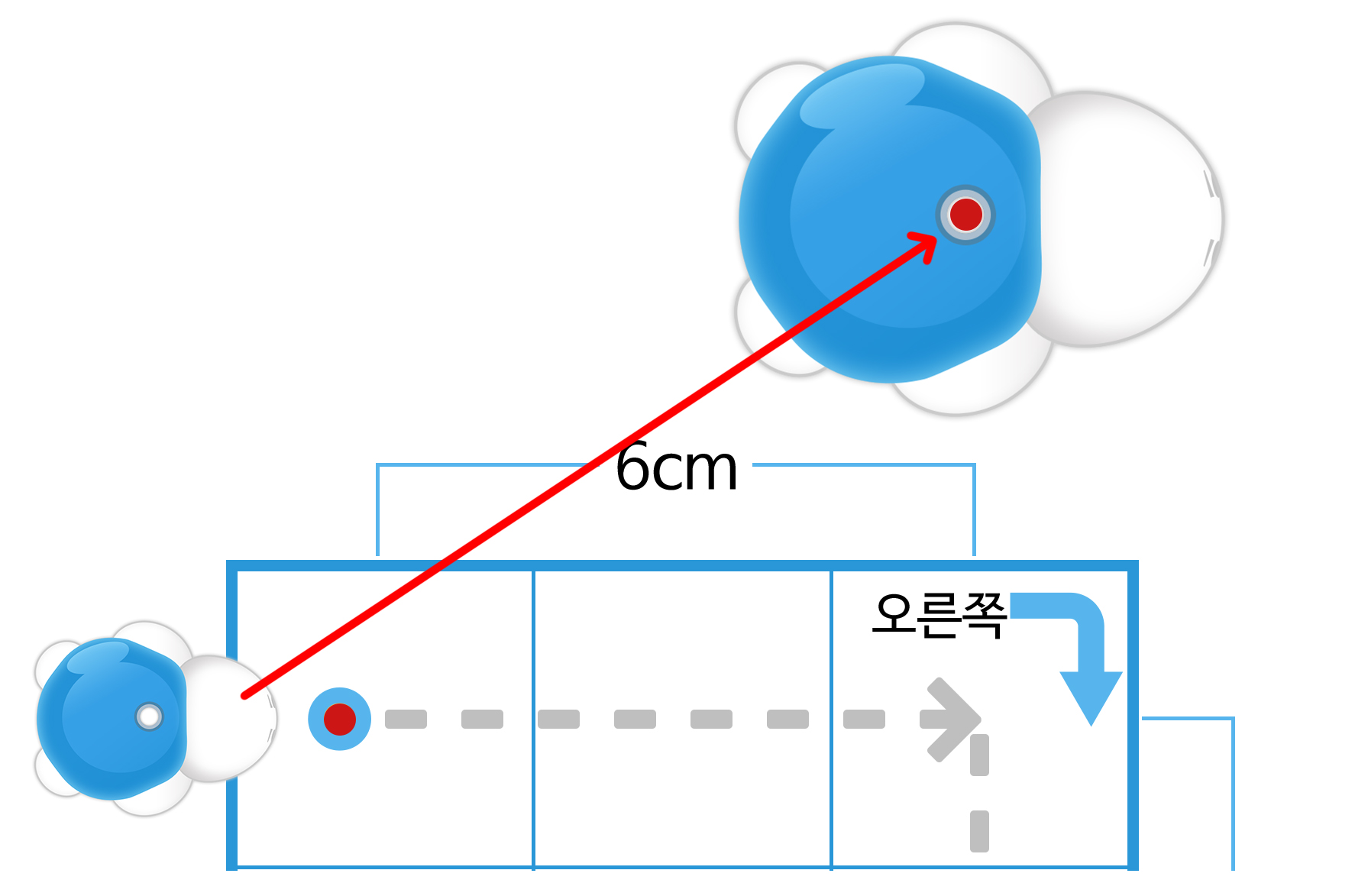
1. 코드를 작성합니다.
2. 점 위에 터틀을 방향에 맞춰 올려놓고, 점이 터틀펜 구멍으로 보이도록 맞춥니다.
3. 코드를 실행합니다.
생각해보기
엔트리에서 로봇을 움직이는 명령 블록 꾸러미는 다.
활동지 2-1
말판에서 터틀 로봇 움직이기
활동지 2-1
말판에서 터틀 로봇 움직이기