
모험 6장 : 드디어 화성에 도착!
【이번 단원에서 살펴볼 내용】
로봇이 가진 센서를 활용하여 명령을 수행해요.
장애물을 인식하여 다음 명령을 수행해요.
목소리나 박수소리를 들으면 방향을 바꾸거나 다음 명령을 수행해요.
로봇를 들고, 내리는 것에 반응하여 다음 명령을 수행해요.
로봇를 앞으로 밀거나 당기는 것에 반응하여 다음 명령을 수행해요.
【준비물】
로봇(윌리), 스마트기기, 색연필, 대시매트, 원더앱

윌리와 우주모험 끝에 드디어 박사님이 주신 임무대로 친구를 만났어요. 친구와 재미있게 놀아봅시다.
1윌리야 같이 놀자!
윌리와 친구가 화성에서 즐거운 놀이를 합니다. 둘이서 어떤 놀이를 하는지 알아보고 함께 해 봅시다.

윌리와 눈가리고 술래잡기 놀이를 해 봅시다.
윌리가 목소리를 듣으면, 목소리가 들리는 방향으로 회전하고 앞으로 이동합니다.


활동 TIP
센서 큐를 활용하면 윌리가 가진 여러 가지 센서를 활용하여 명령을 내릴 수 있다.
로봇이 박수소리를 들으면 애니메이션 우회전, 좌회전 춤을 계속해서 춥니다.

윌리가 눈가리고 놀이를 하다가 돌을 미쳐 못보고 바퀴에 펑크가 나버렸데요. 친구가 뒤에서 밀어주세요.

로봇을 뒤에서 밀면 다음 명령을 수행합니다.

활동 TIP
코딩이 다소 복잡해 보인다. 하나씩 차근차근 명령을 생각하며 하면서 하다 보면 어렵지 않다. 이제 윌리는 손으로 움직이는 로봇이 되었다.

로봇을 후진 시키면 뒤로 움직여요.

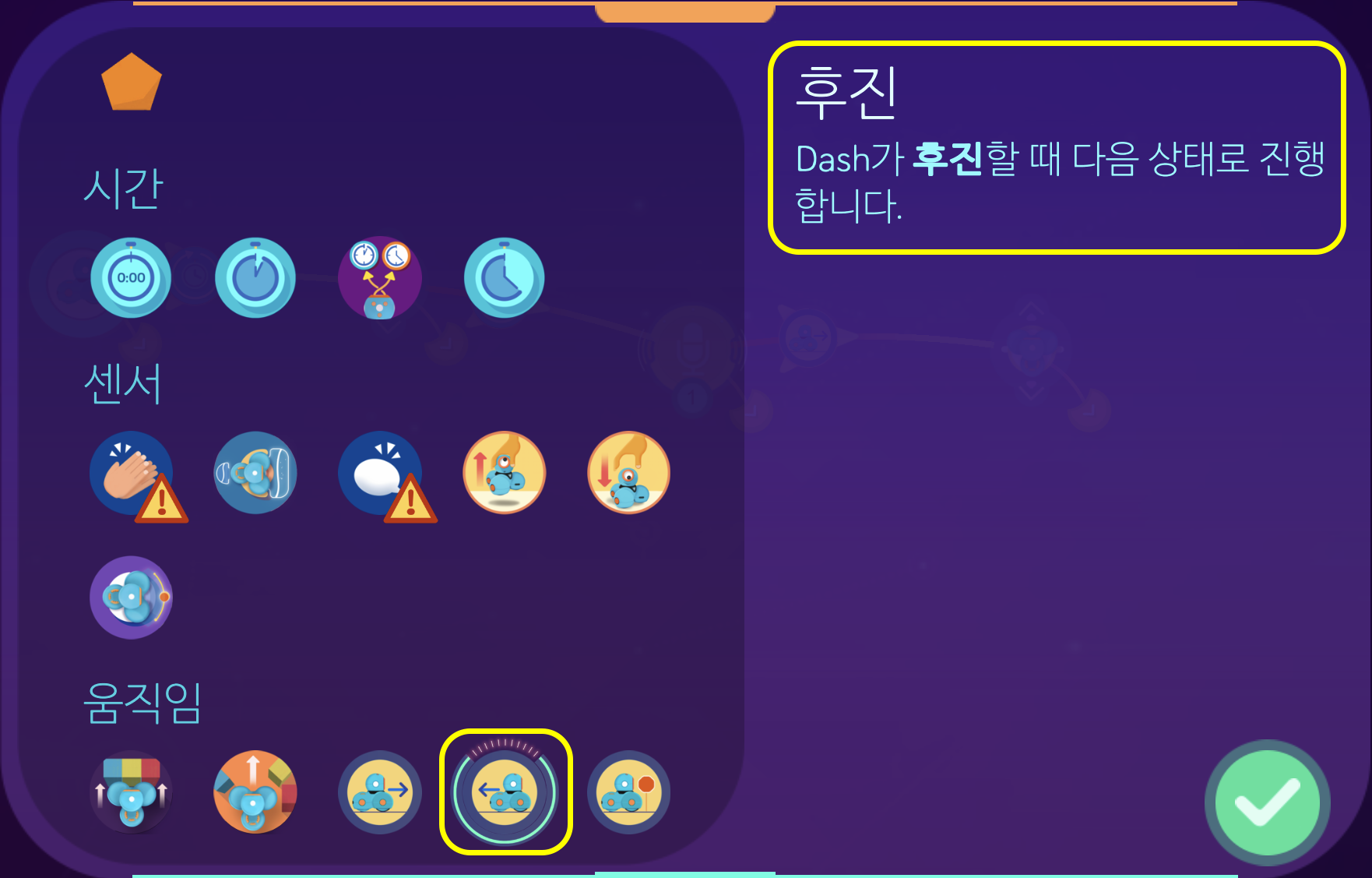
활동 TIP
윌리를 후진시키면(뒤로 당기면) 다음 명령을 수행한다.
2화성은 지구와 달라요
화성에서 즐겁게 놀이를 하는 윌리가 장애물에 부딪혔어요. 지구와는 다르게 돌도 많고, 길도 복잡하기 때문이었어요. 이번에도 친구들이 도와주세요.

친구 집에 놀려가려는 데 장애물이 많네요. 아까처럼 바퀴에 펑크가 나지 않으려면 정지해야합니다. 로봇이 이동하고 있다가 장애물이 있으면 정지합니다.

활동 TIP
이동을 명령하면 윌리는 계속하여 정해진 속도로 이동한다.

활동 TIP
로봇이 이동을 계속하다가 장애물을 만나면 알아서 멈춘다.
로봇이 멈춘 후 좌회전 하여 돌아가게 만들어봅시다.

이번에는 친구가 기다리는 집에 가려니 높은 계단이 있네요. 윌리는 올라갈 수 없어요. 친구들이 올라가서 달릴 수 있도록 도와주세요.

로봇이 계단을 만나고, 정지한 후 올려달라고 말합니다. 들어올리면 “잘했어”라고 말합니다.


더 알아보기
들어올리기 큐를 사용하면 들어올리고 나서 다음 명령을 수행합니다.
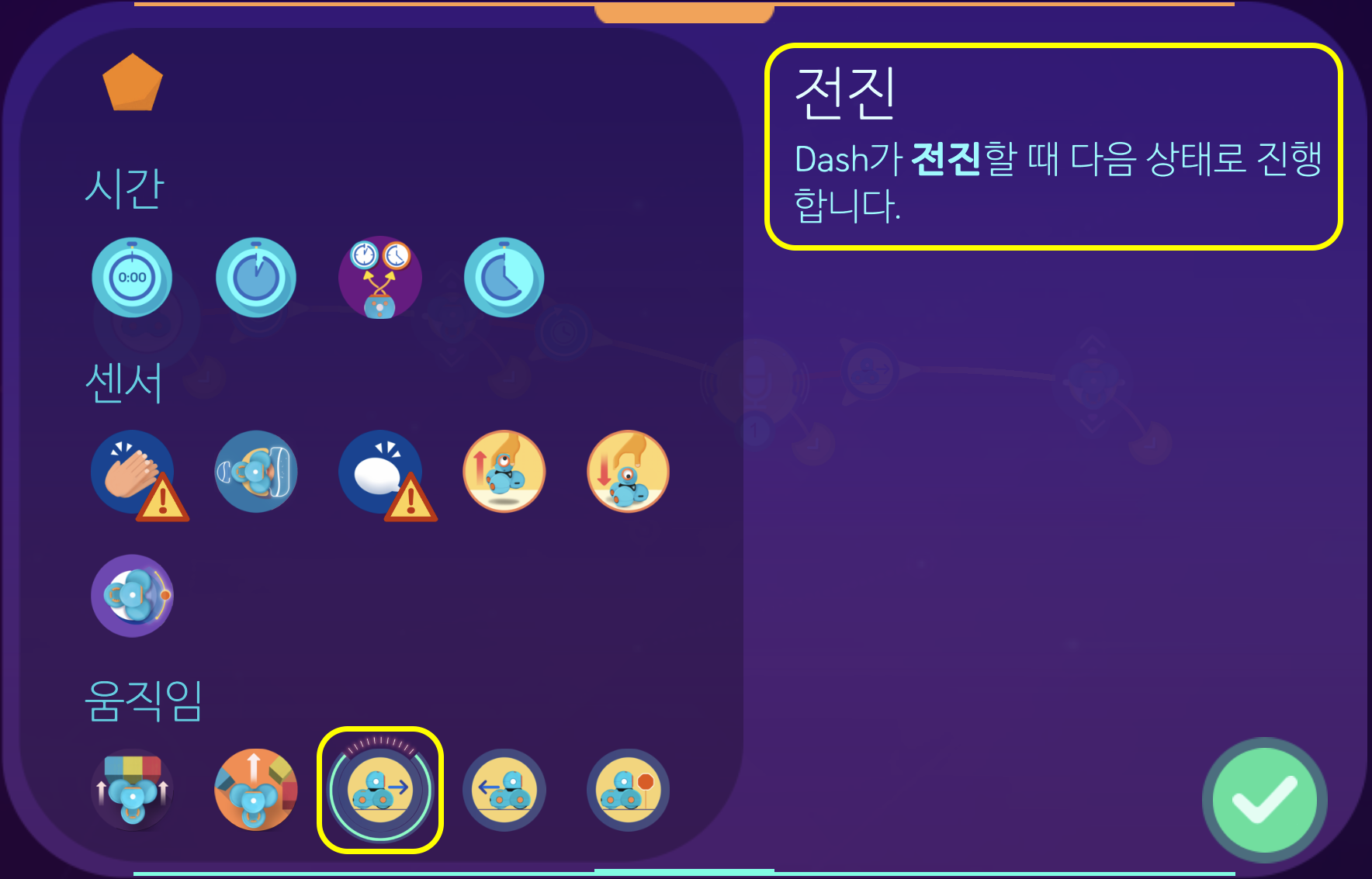
이제 나를 내려줘~! 로봇을 내려놓으면 출발이라고 말하면서 전진합니다.


더 알아보기
내려놓기 큐를 사용하면 들어올리고 나서 다음 명령을 수행합니다.
화성친구의 집은 막다른 골목이었어요. 윌리가 길을 가다 부딪혀서 갇혀버렸네요.


위와 같은 명령을 내리면 로봇이 어떻게 되는지 적어봅시다.
로봇이 움직이지 못하고 갇혔을 때 어떻게 하면 좋을지 생각해봅시다.
로봇이 움직이다가 갇히게 되면 뒤로 후진합니다.


활동 TIP
움직임 장애물 큐를 활용하면 로봇이 갇히게 되면 다음 명령을 수행한다.
장애물 큐를 활용하여 다른 방법으로 로봇을 탈출시키도록 생각해봅시다.
지구의 로봇 윌리와 우주 모험 끝에 드디어 화성의 친구가 만나서 즐겁게 놀고 있습니다. 우리 친구들 덕분이에요. 정말 감사합니다.
우리 친구들이 가지고 있는 다른 로봇으로 우리 친구들만의 우주 모험을 꾸며 보았으면 좋겠어요.