5. 함께 신나게 춤춰요! 인공지능 댄스 로봇
핵심 개념
인공지능 코딩 로봇, 포즈(자세) 인식
활동 목표
파이블록AI 코딩을 통해 자세에 따라 카미봇파이
로봇이 다르게 움직입니다.
| 인공지능 영역 |
인공지능의 이해 | 인공지능 원리와 활용 | 인공지능의 사회적 영향 | |||||
|---|---|---|---|---|---|---|---|---|
| 인공지능과 사회 | 인공지능과 에이전트 | 데이터 | 인식 | 분류,탐색,추론 | 기계학습과 딥러닝 | 인공지능 영향력 | 인공지능 윤리 | |
| ○ | ○ | ○ | ○ | |||||
2015 교육과정 성취기준
[9정통02-01] 정보통신 기기를 선택하고 그 사용 기능을 익힙니다.
[12정통03-03] 프로그램을 이용하여 생각을 표현합니다.
[12정통04-02] 코딩 프로그램의 기능을 익혀 간단한 문제를 해결합니다.
[4음악03-01] 자신이 좋아하는 음악을 들으며 표정, 몸동작, 목소리 등으로 반응합니다.
준비물 : 카미봇파이, 웹캠, 컴퓨터(또는 노트북), USB동글, 인터넷,
색연필, 가위, 테이프
학습 활동
도입
만화 이해하기
나와 함께 춤춰요
학습형태 : 전체학습
활동1
(라인) 이동 블록으로 카미봇파이를 움직여요
이동 블록 알기
머리 회전 블록 알기
학습형태 : 개별화, 수준별 학습
활동2
사람의 자세를 인식해서 춤을 줘요
티처블머신의 자세 인식 모델 만들기
자세를 인식해 다양하게 움직이도록 코딩하기
여러 대를 동시에 움직이도록 코딩하기
학습형태 : 개별화, 수준별 학습
활동3
인공지능 댄스 로봇을 만들어요
카미봇파이 손을 꾸민 후 붙이기
자세 인식 모델 만들기
댄스 로봇 놀이하기
학습형태 : 개별화, 수준별 학습
학습자료 : 활동지 5-1
정리
학습한 내용을 확인 해봐요
학습형태 : 개별화, 수준별 학습
활동 팁
자세 인식이란, 인공지능이 자세를 인식해 구별할 수 있는 것을 말합니다.
다양한 자세와 움직임을 만들어 카미봇파이와 함께 춤추게 합시다.
시작해요나와 함께 춤춰요




▷ 인공지능은 어떻게 자세를 구별할까요?
▷ 인공지능 댄스 로봇을 경험해 본 사례를 서로 이야기해 봅시다.
【학습 목표】
1. 파이블록AI 코딩으로 자세에 따라 카미봇파이 로봇을 움직이며 춤추게 할 수 있습니다.
활동
1(라인) 이동 블록으로 카미봇파이를 움직여요
▷ 파이블록AI로 코딩해서 카미봇파이를 움직이고 머리를 회전시켜 봅시다.
활동 방법






▷ 아래 블록을 사용해서 움직이는 카미봇파이를 멈추도록 코딩해 봅시다.

▸‘이동하기’, ‘돌리기’ 블록은 ‘멈추기’ 블록을 사용하지 않으면 계속 작동됩니다.
활동
2사람의 자세를 인식해서 춤을 춰요
활동 방법
▷ 티처블머신으로 자세를 인식하는 모델을 만들어요.
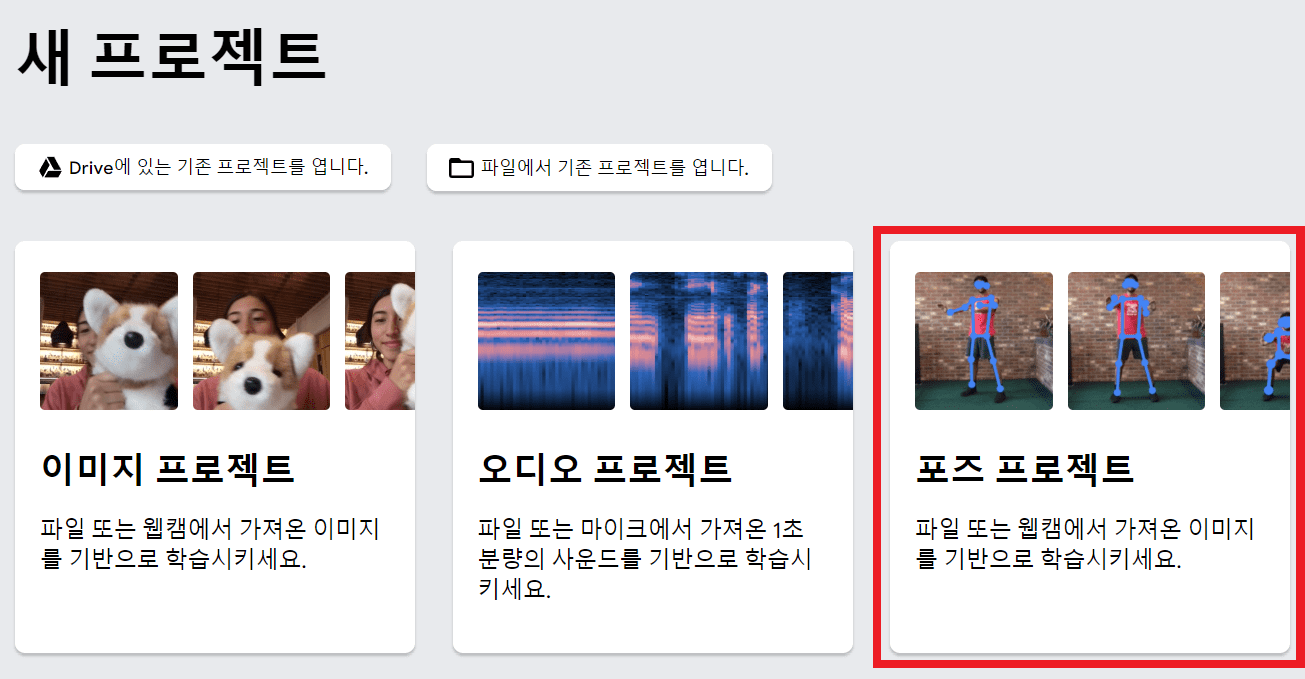
① 티처블머신 사이트에 접속 후 ‘포즈 프로젝트’를 클릭합니다.
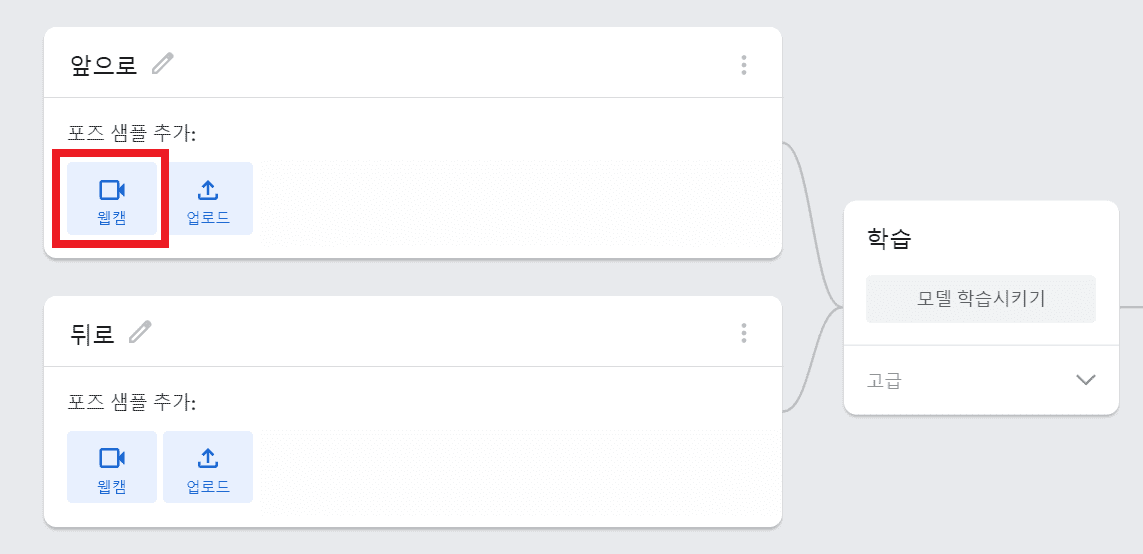
② 클래스 이름을 ‘앞으로’와 ‘뒤로’로 각각 변경한 후 앞으로 ‘웹캠’ 버튼을 클릭합니다.
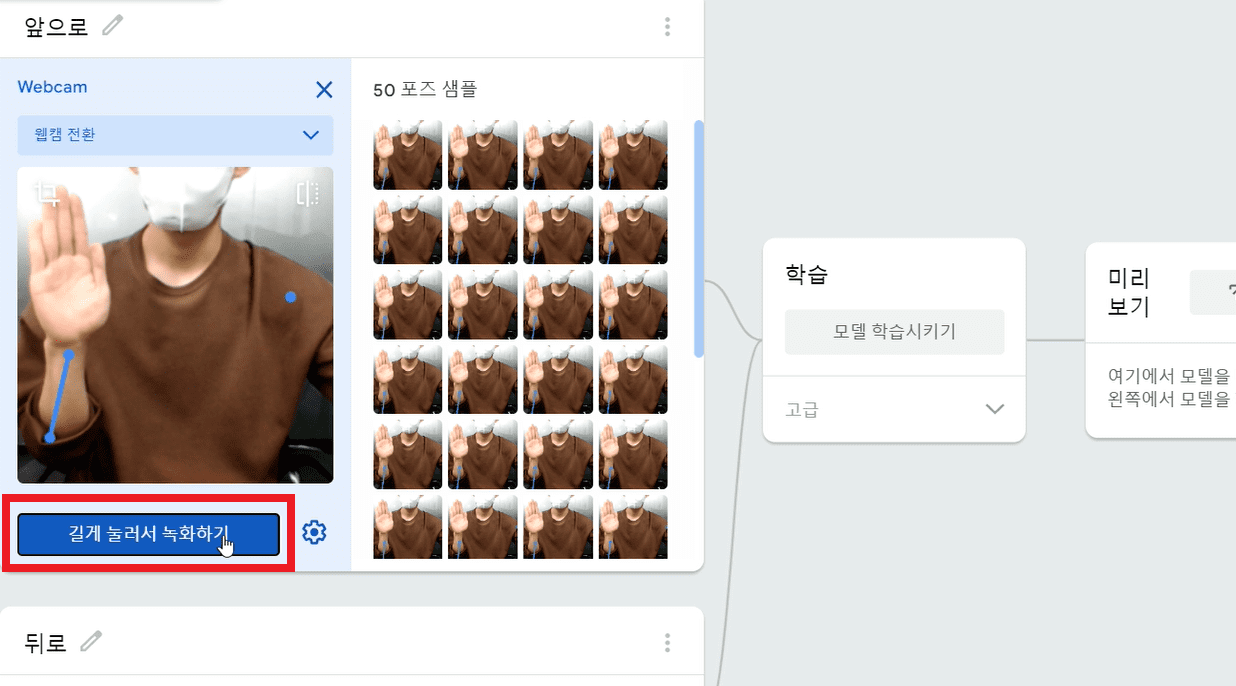
③ ‘앞으로’ 클래스에서 ‘길게 눌러서 녹화하기’ 버튼을 클릭해서 50장 정도 녹화 합니다.
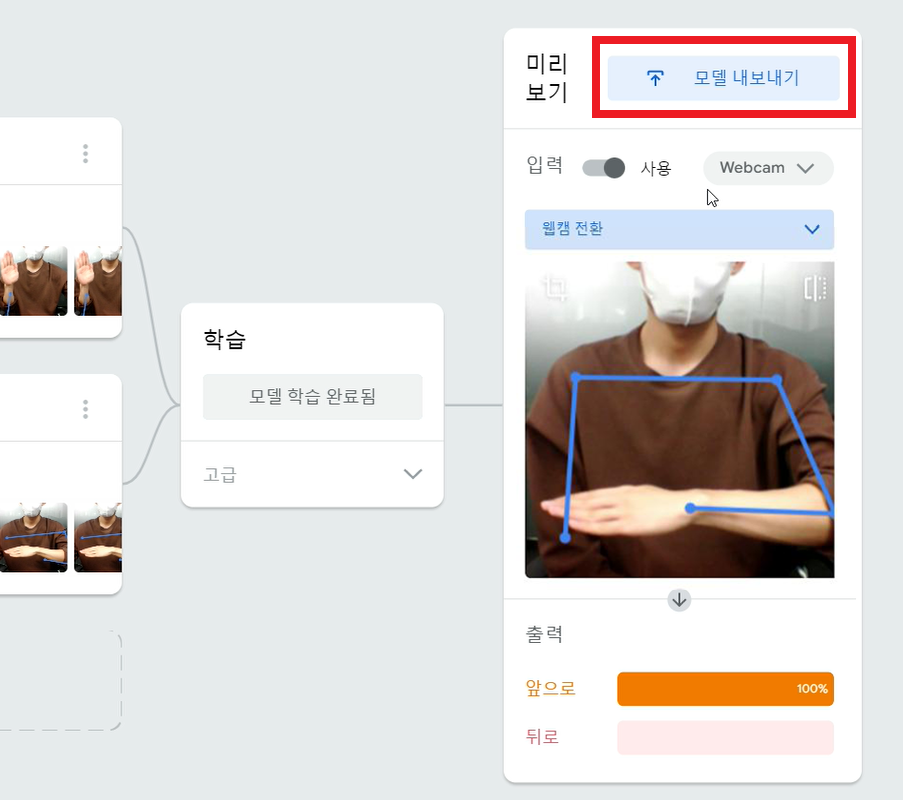
④ ‘뒤로’ 클래스도 동일하게 반복해서 녹화한 후 모델을 학습시켜 내보냅니다.
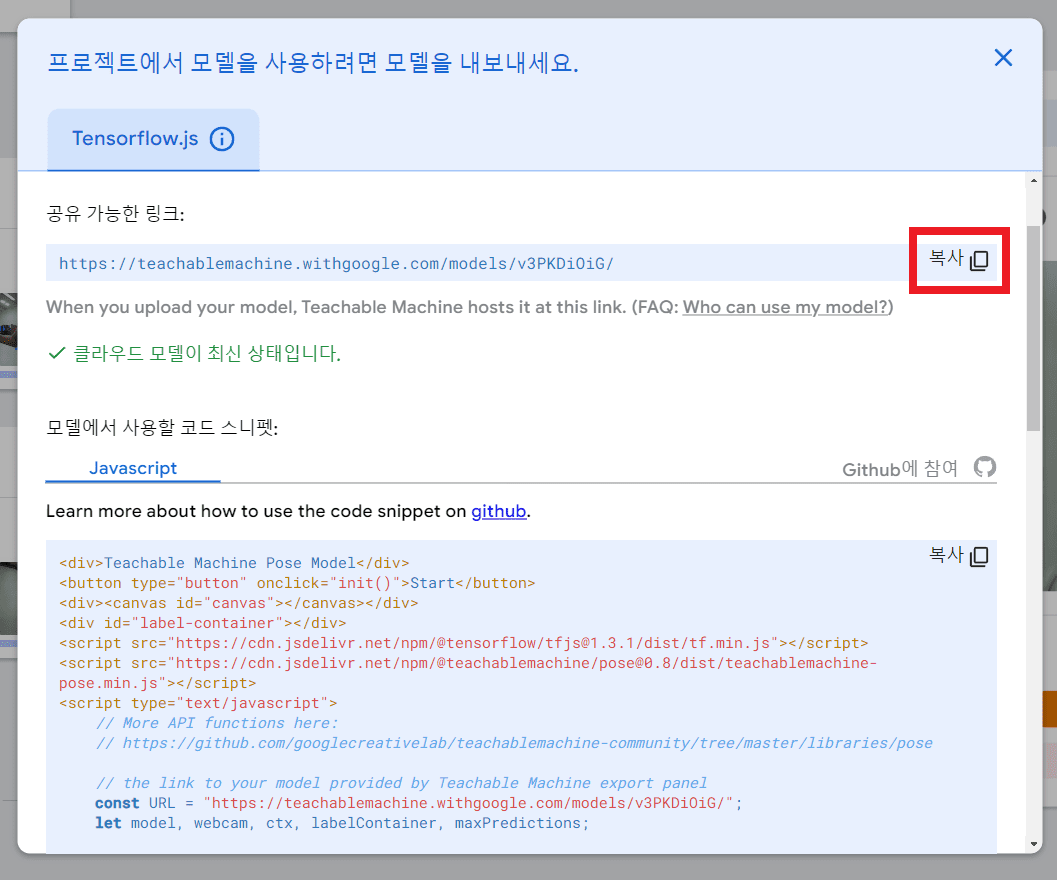
⑤ ‘모델 업로드’ 후 모델 공유 링크를 복사합니다.
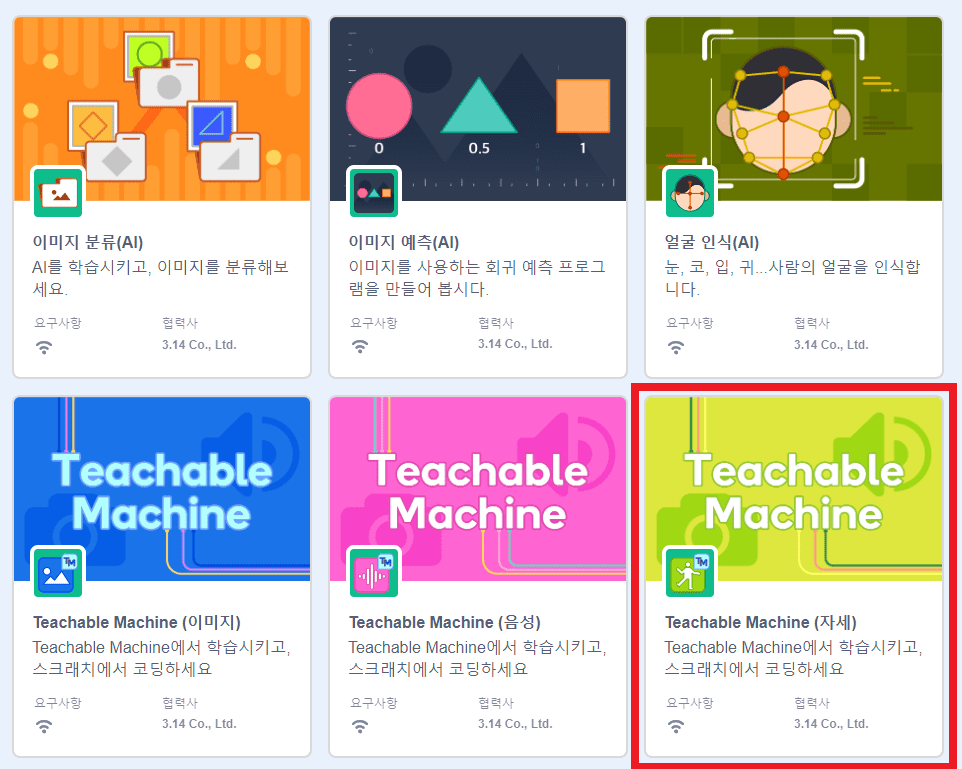
⑥ 파이블록AI ‘확장기능 추가하기’에서 Teachable Machine(자세)을 클릭합니다.
▷ 자세를 인식해 다양하게 움직이도록 코딩해 봅시다.
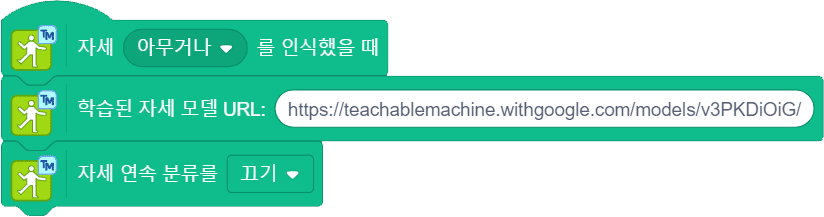
①웹캠으로 자세를 구별하기 위해 ‘티처블머신’에서 학습시킨 모델의 URL를 복사해서 블록에 붙여 넣습니다.

②웹캠에 ‘앞으로’ 자세를 취하면 카미봇파이 로봇이 계속 앞으로 전진하도록 코딩합니다.
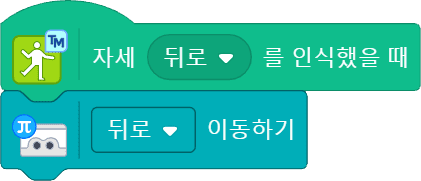
③ 웹캠에 ‘뒤로’ 자세를 취하면 카미봇파이 로봇이 계속 뒤로 후진하도록 코딩합니다.
활동
3인공지능 댄스 로봇을 만들어요

▷ 나만의 댄스 로봇을 만들어 봅시다.
▷ 보기를 참고해서 카미봇파이 로봇의 춤 동작 순서를 번호로 적어봅시다.
| (보기) ① 앞으로, ② 뒤로, ③ 왼쪽으로 돌기, ④ 오른쪽으로 돌기, ⑤ 머리
왼쪽으로 돌리기, ⑥ 머리 오른쪽으로 돌리기, ⑦ 이동 멈추기, ⑧ 머리 멈추기 |
▸카미봇파이 로봇의 각 동작에 해당하는 자세도 함께 정해봅시다. ▸모든 동작을 하기 어려운 경우 학생 수준에 맞게 개수를 정하세요.
활동 방법
① [활동지 5-1] 카미봇파이 팔을 오립니다.

② [활동지 5-1] 카미봇파이 팔을 색연필로 예쁘게 색칠합니다.

③ 카미봇파이에 팔을 테이프로 붙인 후 무대에 놓습니다.
④ 웹캠과 티처블머신을 활용해 자세를 학습시킵니다.

⑤ 파이블록AI로 코딩합니다.

⑥ 댄스 로봇 놀이를 합니다.
[활동지 5-1] 카미봇파이 팔
정리해요학습한 내용을 확인해 봐요
▷ 인공지능 댄스 로봇은 사람의 자세를 인식해서, 각 자세에 따라 다르게 움직이며 춤을 출 수 있습니다.
▷ 확장 기능에서 ‘협동하기’ 블록을 통해 여러 대의 인공지능 댄스 로봇을 동시에 움직일 수 있습니다.
★ 개념 쏙쏙
1
자세 인식이란? 인공지능이 자세를 보고 구별할
수 있는 것을 말합니다.
2
자세 인식을 통해, 카미봇파이를 이동과 머리
블록을 활용해 다양한 움직임을 만들 수 있습니다.
3
‘협동하기’ 블록을 활용해 여러 대의
카미봇파이를 동시에 움직일 수 있습니다.
확인해요
| 평가 내용 | 평가 결과 |
|---|---|
| 카미봇파이를 이동 블록으로 움직일 수 있나요? | |
| 카미봇파이 로봇으로 ‘인공지능 댄스 로봇’을 만들 수 있나요? |
[확장하기]여러 대의 카미봇파이 로봇을 동시에 움직이는 방법을 알아봐요
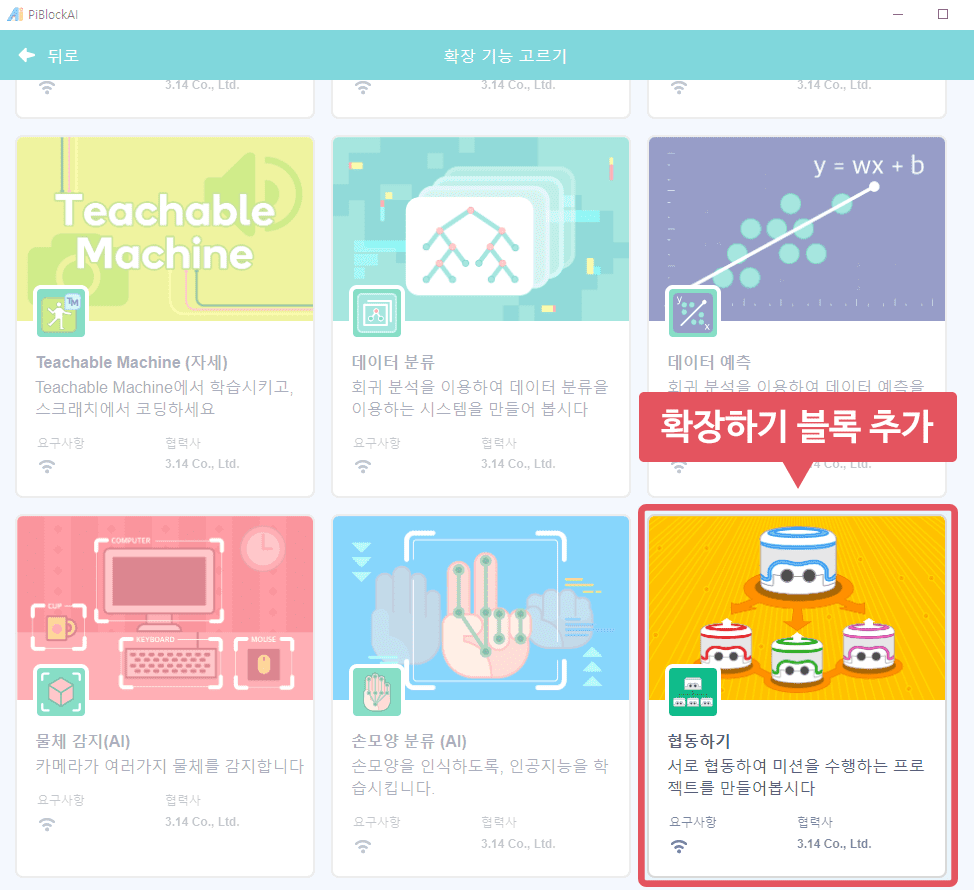
① 파이블록 '확장 기능 추가하기'에서 협동하기를 클릭합니다.
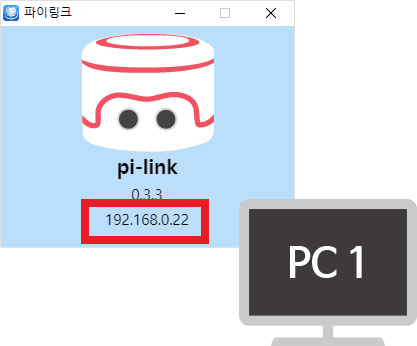
② PC1의 카미링크 IP주소 확인합니다.
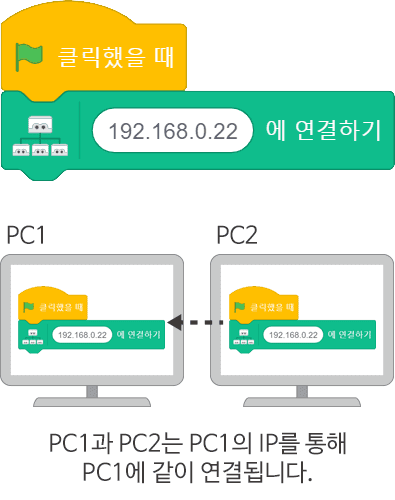
③ 각 컴퓨터마다 협동하기 명령 블록을 만들어 확인한 IP 주소를 적어줍니다.
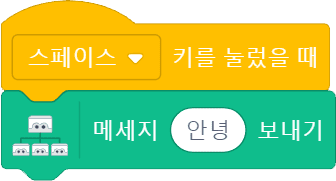
④ PC1에서 '스페이스' 키를 눌렀을 때 '안녕' 신호를 보내는 블록을 만듭니다.
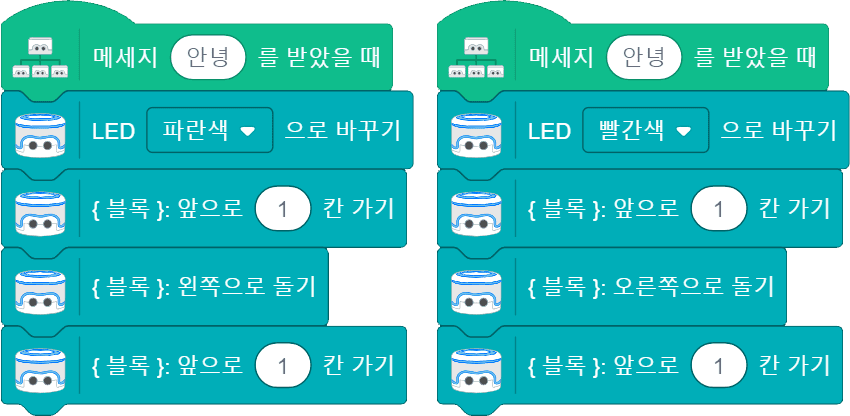
⑤ PC1에 첫 번째, PC2에 두 번째에 해당하는 블록을 코딩합니다.
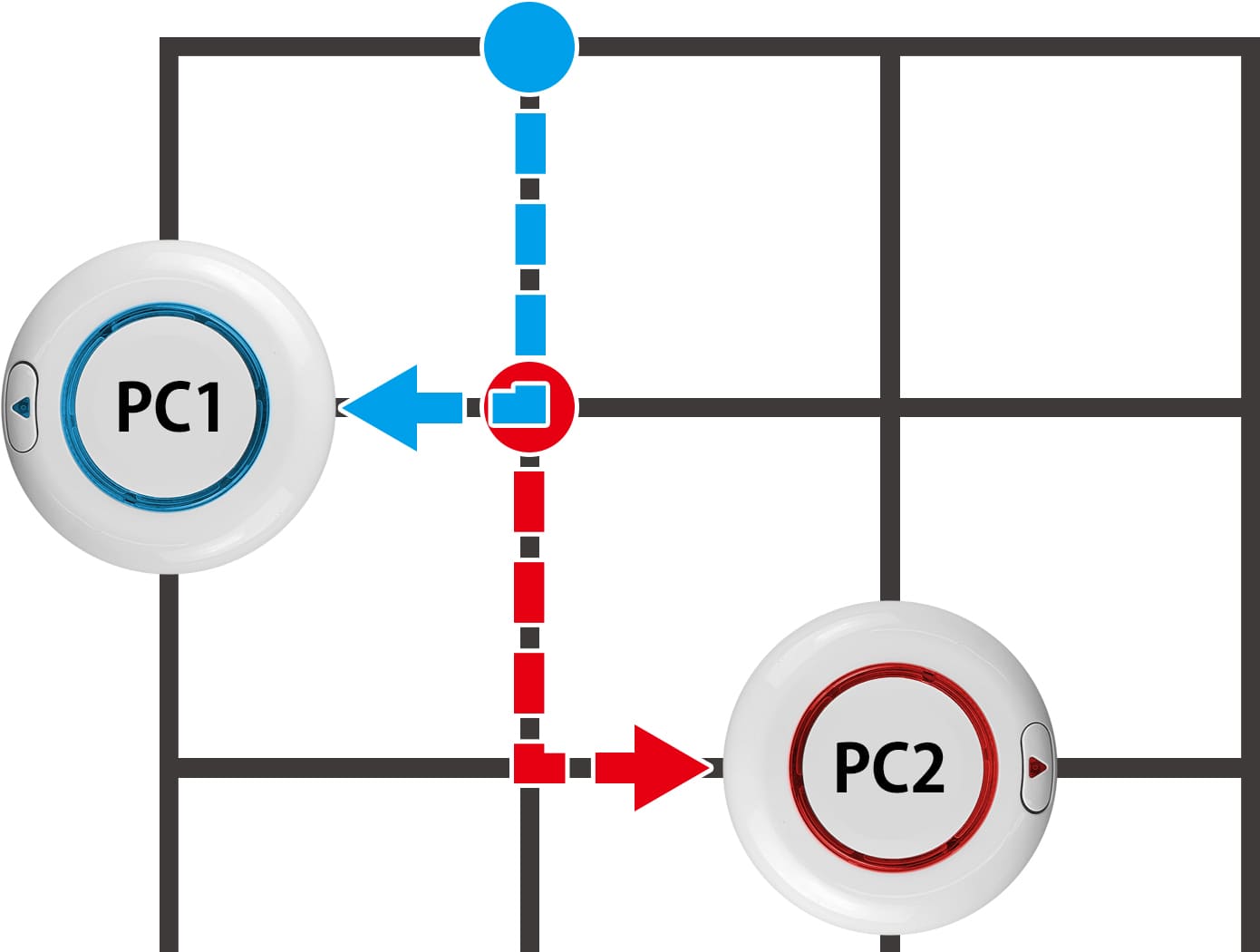
⑥ 실행해서 카미봇파이 2대가 코딩한대로 동시에 함께 움직이는지 확인합니다.